边缘计算
搭载高性能嵌入式处理器,支持NVIDIA、ARM、INTEL等硬件架构,实现本地化实时数据处理与分析,支持多传感器信息融合。通过低延迟运算保障决策时效性,减少云端依赖,确保复杂环境下的任务连贯性。
机器人感知与控制技术,使用高精度SLAM算法和传感器融合系统实现了机器人对周围环境的实时感知,将视觉导航、智能避障、多模态建图、动态路径规划
技术有机结合。采用低延迟多协议通信架构,支持电池效能优化。

边缘计算
搭载高性能嵌入式处理器,支持NVIDIA、ARM、INTEL等硬件架构,实现本地化实时数据处理与分析,支持多传感器信息融合。通过低延迟运算保障决策时效性,减少云端依赖,确保复杂环境下的任务连贯性。
视觉导航
通过融合多目摄像头与先进的深度学习算法,构建高精度的三维环境感知,实现厘米级定位精度。支持动态物体识别与语义分割,自适应场景光线变化,自动进行布局调整。
智能避障
融合激光雷达、TOF摄像头与超声波传感器,建立360°障碍物探测网络。通过概率预测算法预判移动物体轨迹,提供0.1秒级响应速度的紧急制动策略,支持静态障碍物分类与动态规避路径生成。
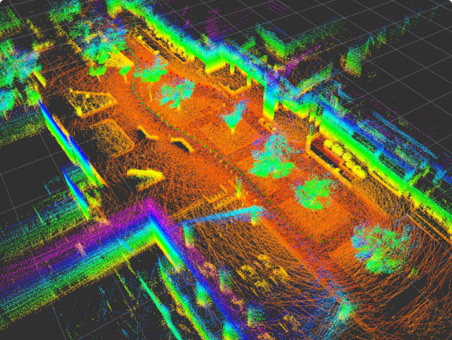
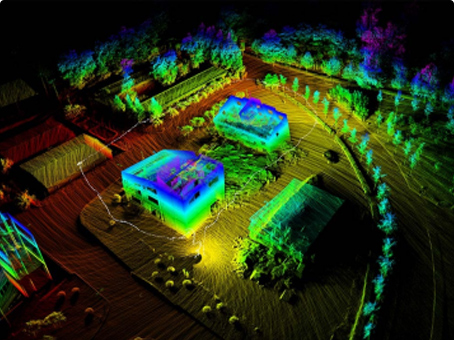
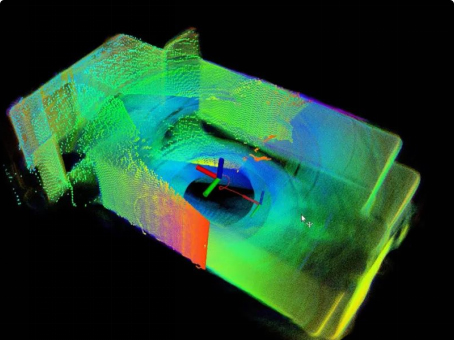
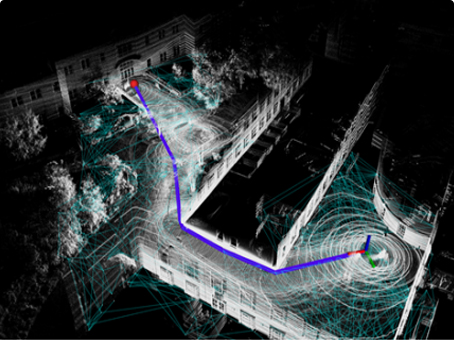
多模态建图
基于SLAM技术实现2D/3D混合地图构建,支持点云地图、拓扑地图、语义地图等多形式输出。具备增量式地图更新能力,可通过环境特征匹配实现长期运行中的地图漂移修正,定位误差小于±2CM。
定制化底盘
模块化结构支持轮式、履带、足式等移动形态定制,负载能力覆盖50KG-2T范围。配备自适应悬挂系统与扭矩控制单元,可适应15°坡道、5CM间隙等地形,IP67防护等级满足室内外场景需求。
动态路径规划
集成A*、RRT*等算法实现全局规划与局部重规划的无缝衔接。支持多机器人协同调度与优先级设置,具备交通管制功能,可在狭窄通道自动生成交替通行方案,路径优化效率提升40%以上。


工业巡检

市政环卫

仓储物流

仓储物流机器人
博昂科技仓储物流机器人它融合了自主导航、路径规划、多任务协同作业、柔性搬运与负载适配等多项先进技术。机器人采用多传感器融合技术实现厘米级定位与动态避障,支持“货到人”和“订单到人”模式,通过集群调度系统可实现百台机器人高效协同,拣选效率提升高达300%。其承重范围广泛,兼容多种载体,并配备自适应抓取臂,轻松应对不规则物品搬运。此外,机器人内置AI自学习算法,实时监测设备状态,故障预警准确率达99.5%,大幅降低停机时间。

安防巡检机器人
安防巡检机器人深度融合AI视觉、多模态传感与自主导航技术,为工业、园区等场景提供全天候服务。机器人搭载高精度激光雷达、红外热成像及360°全景摄像头,支持复杂环境下厘米级定位与动态路径规划,自主避障并覆盖99.8%的巡检盲区。其AI算法可实时识别烟火、入侵、设备异常等20余类风险,同步联动声光报警并推送至云端管理平台。还支持远程操控与多机协同组网。机器人配备防爆防水机身与超长续航系统,可通过数字孪生技术生成3D实景安防地图,实现风险预测与处置预案自动优化。
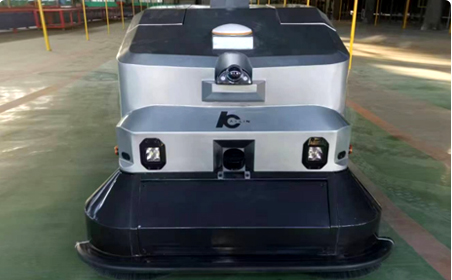
无人清扫机器人
无人清扫机器人集成AI视觉、多传感器融合与自主导航技术,专为城市街道、工业园区、商业综合体等场景提供高效智能清洁服务。机器人搭载激光雷达、3D摄像头与超声波传感器,实现厘米级定位与动态避障,清扫覆盖率超99%。其AI算法可识别垃圾类型、积水等10余类环境问题,搭配高压喷洗、真空吸附与尘盒自清洁系统。内置路径优化模型,支持多机协同调度,实时生成清洁热力图并同步至云端管理平台,运维成本降低55%。通过数字孪生技术,实时生成3D清洁地图并预测污染高发区域。


 鲁公网安备37010102006918号
鲁公网安备37010102006918号